2024-06-17 15:01:17
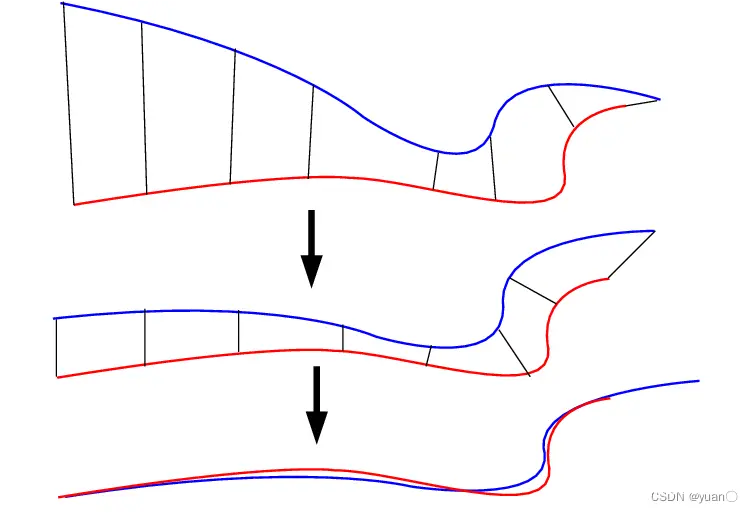
本部分结合了网上的一些资料以及自己的一些理解,可能不一定正确,部分步骤有所省略,具体可参考文末参考文献。定义两个点云集合Pp1p2pnPp1p2...pnQq1q2qnQq1q2...qn,其中PP...
浏览 65 次 标签: 【PCL】—— 点云配准ICP(Iterative Closest Point)算法
阅读排行
- (番外)+(全文)一别经年几多梦/佳人多晚归全文+后续+结局(虞夕晚陆景珩)全文免费阅读无弹窗大结局_一别经年几多梦/佳人多晚归全文+后续+结局最新章节列表_笔趣阁(虞夕晚陆景珩)
- 余生不赴同淋雪白悠悠:结局+番外(楚青枫白悠悠)好文分享(楚青枫白悠悠)全文免费阅读无弹窗大结局_余生不赴同淋雪白悠悠:结局+番外最新章节列表_笔趣阁(楚青枫白悠悠)
- 等冬来雪落尽温初晗席令城推荐完本_已完结等冬来雪落尽温初晗(席令城)
- (结局)+(全文)姜黎陆瑾臣(重返人间后小叔火葬场了:全文+结局+番外)全文免费阅读无弹窗大结局_(姜黎陆瑾臣)最新章节列表_笔趣阁(重返人间后小叔火葬场了:全文+结局+番外)
- 楚青枫白悠悠(余生不赴同淋雪白悠悠:结局+番外)全文免费阅读无弹窗大结局_(楚青枫白悠悠)最新章节列表_笔趣阁(余生不赴同淋雪白悠悠:结局+番外)
- 余生不赴同淋雪:完结+结局+番外(余生不赴同淋雪:完结+结局+番外)全文免费阅读无弹窗大结局_楚青枫白悠悠最新章节列表_笔趣阁(余生不赴同淋雪:完结+结局+番外)
- 相思相忆空吟:结局+番外(林暖陆祁景)全文免费阅读无弹窗大结局_(相思相忆空吟:结局+番外)林暖陆祁景最新章节列表_笔趣阁(林暖陆祁景)
- (番外)+(全文)白悠悠楚青枫(余生不赴同淋雪:结局+番外)完整全文在线阅读_白悠悠楚青枫免费阅读最新章节列表_笔趣阁(余生不赴同淋雪:结局+番外)
- 江岁欢顾璟之(弄娇:结局+番外)完结阅读无弹窗大结局_(江岁欢顾璟之)最新章节列表_笔趣阁(弄娇:结局+番外)
热门文章
- 一别经年几多梦/佳人多晚归:结局+番外(虞夕晚陆景珩)全文免费阅读无弹窗大结局_一别经年几多梦/佳人多晚归:结局+番外(虞夕晚陆景珩)最新章节列表_笔趣阁虞夕晚陆景珩
- 余生不赴同淋雪:全文+后续(白悠悠楚青枫)完结阅读无弹窗大结局_余生不赴同淋雪:全文+后续免费阅读最新章节列表_笔趣阁(白悠悠楚青枫)
- 余生不赴同淋雪:全文+后续/全集/电子书/大结局(余生不赴同淋雪:全文+后续)白悠悠楚青枫阅读-耽美微白悠悠楚青枫
- 姜黎陆瑾臣:结局+番外(姜黎陆瑾臣)全文免费阅读无弹窗大结局_(姜黎陆瑾臣:结局+番外)最新章节列表_笔趣阁(姜黎陆瑾臣)
- 提出离婚第一天,系统奖励一个亿(陈锋)最新推荐_最新推荐提出离婚第一天,系统奖励一个亿(陈锋)
- 余生不赴同淋雪:结局+番外(楚青枫白悠悠)全文免费阅读无弹窗大结局_(余生不赴同淋雪:结局+番外)楚青枫白悠悠免费阅读无弹窗最新章节列表(余生不赴同淋雪:结局+番外)
- (番外)+(结局)姜黎陆瑾臣:结局+番外(姜黎陆瑾臣)全文免费阅读无弹窗大结局_(姜黎陆瑾臣:结局+番外)最新章节列表_笔趣阁(姜黎陆瑾臣)
- (番外)+(结局)余生不赴同淋雪楚青枫:结局+番外(楚青枫白悠悠)全文免费阅读无弹窗大结局_(余生不赴同淋雪楚青枫:结局+番外)最新章节列表_笔趣阁(楚青枫白悠悠)
- 余生不赴同淋雪结局+番外(楚青枫白悠悠)书荒宝藏热文必读推荐(楚青枫白悠悠)全文免费阅读无弹窗大结局_余生不赴同淋雪结局+番外最新章节列表_笔趣阁(楚青枫白悠悠)
名师推荐
- (重返人间后小叔火葬场了:全文+结局+番外)宝藏小说分享(姜黎陆瑾臣)全文免费阅读无弹窗大结局_(重返人间后小叔火葬场了:全文+结局+番外)最新章节列表_笔趣阁(姜黎陆瑾臣)
- 余生不赴同淋雪:大结局+后续小说楚青枫白悠悠小说余生不赴同淋雪:大结局+后续小说楚青枫白悠悠-余生不赴同淋雪:大结局+后续小说小说在哪里可以看楚青枫白悠悠
- 楚青枫白悠悠全文+番外+大结局(余生不赴同淋雪:结局+番外)免费在线阅读_楚青枫白悠悠(余生不赴同淋雪:结局+番外)全文免费阅读无弹窗大结局
- (番外)+(全文)区区蛟龙,且看贫道一剑斩之!:全文+后续小说免费下载阅读_(张清扬)区区蛟龙,且看贫道一剑斩之!:全文+后续最新章节列表_笔趣阁(张清扬)
- 姜黎陆瑾臣(重返人间后小叔火葬场了:全文+结局+番外)全文免费阅读无弹窗大结局_(姜黎陆瑾臣)最新章节列表_笔趣阁(重返人间后小叔火葬场了:全文+结局+番外)
- (番外)+(全文)乔若锦周祁年:全文+结局+番外(乔若锦周祁年)全文免费阅读无弹窗大结局_乔若锦周祁年:全文+结局+番外最新章节列表_笔趣阁(乔若锦周祁年:全文+结局+番外)
- (番外)+(结局)乔若锦周祁年(乔若锦周祁年:全文+结局+番外)完结阅读无弹窗大结局_(乔若锦周祁年)最新章节列表_笔趣阁(乔若锦周祁年:全文+结局+番外)
- 重返人间后,小叔火葬场了:结局+番外(姜黎陆瑾臣)全文免费阅读无弹窗大结局_重返人间后,小叔火葬场了:结局+番外(姜黎陆瑾臣)最新章节列表_笔趣阁姜黎陆瑾臣
- 等冬来雪落尽温初晗全文小说席令城小说在线阅读